
典型的PID处理程序
2012-06-22
lookuper
8
*============================ ======================================================================== 这是一个比较典型的PID处理程序,在使用单片机作为控制cpu时,请稍作简化,具体的PID参数必须由具体对象通过实验确定。由于单片机的处理速度和 ram资源的限制,一般不采用浮点数运算,而将所有参数全部用整 ..
[查看全文]
PID控制参数如何设定调节
2012-06-22
30
PID控制简介 目前工业自动化水平已成为衡量各行各业现代化水平的一个重要标志。同时,控制理论的发展也经历了古典控制理论、现代控制理论和智能控制理论三个阶段。智能控制的典型实例是模糊全自动洗衣机等。自动控制系统可分为开环控制系统和闭环控制系统。一个控控制系统包括控制器﹑传感器﹑变送器﹑执行机构﹑输入输出接口 ..
[查看全文]
数字PID控制及其改进算法的应用
2012-06-19
马永军 殷侠 杨亚琴
10
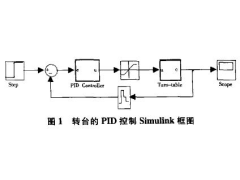
PID控制是最早发展起来的控制策略之一,由于其算法简单、鲁棒性好和可靠性高,被广泛用于过程控制和运动控制中。数字PID控制算法是将模拟PID离散化得到,各参数有着明显的物理意义,调整方便,所以PID控制器很受工程技术人员的喜爱。 转台是检测和评价惯性导航与制导系统的主要测试设备。转台内安装的是力矩电机,因此理想的 ..
[查看全文]
推荐文章
最新文章
热门文章