PID参数设置指南
2012-06-02
标签:
PID参数
启动PID参数自整定程序,可自动计算PID参数,自整定成功率95%,少数自整定不成功的系统可按以下方法调PID参数。
P参数设置
如不能肯定比例调节系数P应为多少,请把P参数先设置大些(如30%),以避免开机出现超调和振荡,运行后视响应情况再逐步调小,以加强比例作用的效果,提高系统响应的快速性,以既能快速响应,又不出现超调或振荡为最佳。
I参数设置
如不能肯定积分时间参数I应为多少,请先把I参数设置大些(如1800秒),(I> 3600时,积分作用去除)系统投运后先把P参数调好,尔后再把I参数逐步往小调,观察系统响应,以系统能快速消除静差进入稳态,而不出现超调振荡为最佳。
D参数设置
如不能肯定微分时间参数D应为多少,请先把D参数设置为O,即去除微分作用,系统投运后先调好P参数和I参数,P、I确定后,再逐步增加D参数,加微分作用,以改善系统响应的快速性,以系统不出现振荡为最佳,(多数系统可不加微分作用)。
可能会用到的工具/仪表
相关文章
推荐文章
-
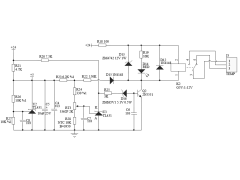 一款高温报警电路2024年11月13日 81
一款高温报警电路2024年11月13日 81 -
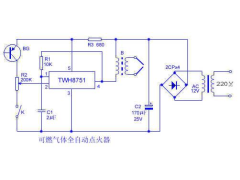 可燃气体全自动点火器2012年09月22日 76
可燃气体全自动点火器2012年09月22日 76 -
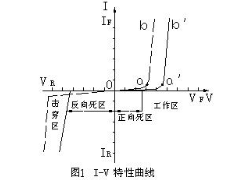 LED参数与特性2012年09月18日 118
LED参数与特性2012年09月18日 118 -
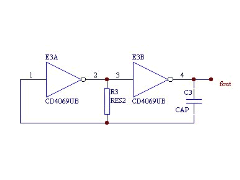 RC振荡电路的几种接法2012年09月10日 221
RC振荡电路的几种接法2012年09月10日 221 -
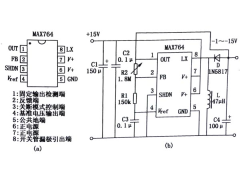 MAX764极性反转电路2012年08月24日 47
MAX764极性反转电路2012年08月24日 47 -
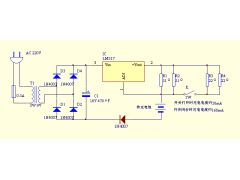 实用恒流充电器2012年08月18日 175
实用恒流充电器2012年08月18日 175 -
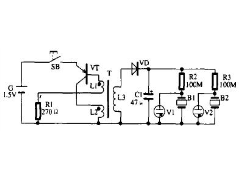 电子催眠器制作2012年08月15日 72
电子催眠器制作2012年08月15日 72 -
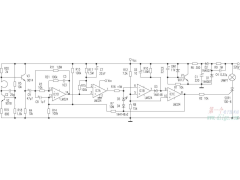 多普勒自动电子开关2012年08月02日 78
多普勒自动电子开关2012年08月02日 78
热门文章
-
 常用物质金属非金属的电阻率、导电率明细表2024年11月23日 4875
常用物质金属非金属的电阻率、导电率明细表2024年11月23日 4875 -
 自制微型交流电焊机2012年07月14日 1143
自制微型交流电焊机2012年07月14日 1143 -
 声光控延时开关的制作2024年07月06日 915
声光控延时开关的制作2024年07月06日 915 -
 用LM1875替找TDA20302012年09月15日 777
用LM1875替找TDA20302012年09月15日 777 -
 6N3+LM4780功放制作2012年09月13日 653
6N3+LM4780功放制作2012年09月13日 653 -
 小型太阳能供电板的制作2012年09月08日 649
小型太阳能供电板的制作2012年09月08日 649 -
 简单的逆变器电路2012年07月08日 560
简单的逆变器电路2012年07月08日 560 -
 1000米晶体稳频FM立体声发射机2012年07月22日 499
1000米晶体稳频FM立体声发射机2012年07月22日 499
章节目录