经过几天调试除掉几个bug以后,ucos+lwip在我的44b0+8019开发板上终于跑得比较稳定了.一只觉得lwip是一个不错的开放源码的tcp/ip 协议栈,想把自己对lwip的移植和理解写出来.但是由于最近比较忙,lwip的移植也是利用业余时间做的,今天写好了第一部分(lwip的 process model)先贴上来,如果大家有兴趣我再接着往下写.另外我的移植参看了skyeye扬晔大侠的代码,大家可以去看看扬晔大侠的lwip在ucos上移植的文章和代码.
lwIP是瑞士计算机科学院(Swedish Institute of Computer Science)的Adam Dunkels等开发的一套用于嵌入式系统的开放源代码TCP/IP协议栈。Lwip既可以移植到操作系统上,又可以
在无操作系统的情况下独立运行.
LwIP的特性如下:
(1)支持多网络接口下的IP转发
(2)支持ICMP协议
(3)包括实验性扩展的的UDP(用户数据报协议)
(4)包括阻塞控制,RTT估算和快速恢复和快速转发的TCP(传输控制协议)
(5)提供专门的内部回调接口(Raw API)用于提高应用程序性能
(6)可选择的Berkeley接口API(多线程情况下)
(7)在最新的版本中支持ppp
(8)新版本中增加了的IP fragment的支持.
(9)支持DHCP协议,动态分配ip地址.
现在网上最新的版本是V0.6.4
1.lwip的进程模型(process model)
tcp/ip协议栈的process model一般有几种方式.
- tcp/ip协议的每一层是一个单独进程.链路层是一个进程,ip层是一个进程,tcp层是一个进程.这样的好处是网络协 议的每一层都非常清晰,代码的调试和理解都非常容易.但是最大的坏处数据跨层传递时会引起上下文切换(context switch). 对于接收一个TCP segment要引起3次context switch(从网卡驱动程序到链路层进程,从链路层进程到ip层进程,从ip层进程到TCP进程).通常对于操作系统来说,任务切换是要浪费时间的.过频的context swich是不可取的.
- 另外一种方式是TCP/IP协议栈在操作系统内核当中.应用程序通过操作系统的系统调用(system call)和协议栈来进行通讯. 这样TCP/IP的协议栈就限定于特定的操作系统内核了.如windows就是这种方式.
- lwip的process model:所有tcp/ip协议栈都在一个进程当中,这样tcp/ip协议栈就和操作系统内核分开了.而应用层程序既可以是单独的进程也可以驻留在tcp/ip进程中.如果应用程序是单独的进程可以通过操作系统的邮箱,消息队列等和tcp/ip进程进行通讯.
如果应用层程序驻留tcp/ip进程中,那应用层程序就利用内部回调函数口(Raw API)和tcp/ip协议栈通讯.对于ucos来说进程就是一个系统任务.lwip的process model请参看下图.在图中可以看到整个tcp/ip协议栈都在同一个任务(tcpip_thread)中.应用层程序既可以是独立的任务(如图中的 tftp_thread,tcpecho_thread),也可以在tcpip_thread中(如图左上角)中利用内部回调函数口(Raw API)和tcp/ip协议栈通讯。

2 Port Lwip to uCos
在这个项目中我用的硬件平台是s3c44b0x+rtl8019.ucos在44b0上的移植在网上有很多大侠非常详尽的讲解和移植代码.我就不敢罗嗦了.需要说明的一点是lwip会为每个网络连接动态分配一些信号量(semaphone)和消息队列(Message Queue),当连接断开时会删掉这些semaphone和Queue.而Ucos-2.0不支持semaphone和Queue的删除,所以要选择一些较高版本的ucos.我用的是ucos-2.51.
2.1 Lwip的操作系统封装层(operating system.emulation layer)
Lwip 为了适应不同的操作系统,在代码中没有使用和某一个操作系统相关的系统调用和数据结构.而是在lwip和操作系统之间增加了一个操作系统封装层.操作系统封装层为操作系统服务(定时,进程同步,消息传递)提供了一个统一的接口.在lwip中进程同步使用semaphone和消息传递采用”mbox”(其实在ucos的实现中我们使用的是Message Queue来实现lwip中的”mbox”,下面大家可以看到这一点)
Operating system emulation layer的原代码在…/lwip/src/core/sys.c中.而和具体的操作系统相关的代码在../lwip/src/arch/sys_arch.c中.
操作系统封装层的主要函数如下:
void sys_init(void)//系统初始化 sys_thread_t sys_thread_new(void (* function)(void *arg), void *arg, int prio) //创建一个新进程 sys_mbox_t sys_mbox_new(void)//创建一个邮箱 voidsys_mbox_free(sys_mbox_t mbox)//释放并删除一个邮箱 voidsys_mbox_post(sys_mbox_t mbox, void *data) //发送一个消息到邮箱 void sys_mbox_fetch(sys_mbox_t mbox, void **msg)//等待邮箱中的消息 sys_sem_t sys_sem_new(u8_t count)//创建一个信号量 void sys_sem_free(sys_sem_t sem)//释放并删除一个信号量 void sys_sem_signal(sys_sem_t sem)//发送一个信号量 void sys_sem_wait(sys_sem_t sem)//等待一个信号量 void sys_timeout(u32_t msecs, sys_timeout_handler h, void *arg)//设置一个超时事件 void sys_untimeout(sys_timeout_handler h, void *arg)//删除一个超时事件
关于操作系统封装层的信息可以阅读lwip的doc目录下面的sys_arch.txt.文件.
2.2 Lwip在ucos上的移植.
2.2.1 系统初始化
sys_int必须在tcpip协议栈任务tcpip_thread创建前被调用.
#define MAX_QUEUES20
#define MAX_QUEUE_ENTRIES20
typedef struct {
OS_EVENT*pQ;//ucos中指向事件控制块的指针
void*pvQEntries[MAX_QUEUE_ENTRIES];//消息队列
//MAX_QUEUE_ENTRIES消息队列中最多消息数
} TQ_DESCR, *PQ_DESCR;
typedef PQ_DESCRsys_mbox_t;//可见lwip中的mbox其实是ucos的消息队列
static char pcQueueMemoryPool[MAX_QUEUES * sizeof(TQ_DESCR) ];
void sys_init(void)
{
u8_t i;
s8_tucErr;
pQueueMem = OSMemCreate( (void*)pcQueueMemoryPool, MAX_QUEUES, sizeof(TQ_DESCR), &ucErr );//为消息队列创建内存分区
//init lwip task prio offset
curr_prio_offset = 0;
//init lwip_timeouts for every lwip task
//初始化lwip定时事件表,具体实现参考下面章节
for (i = 0; LWIP_TASK_MAX; i++) {
lwip_timeouts[i].next = NULL;
}
}
2.2.2 创建一个和tcp/ip相关新进程:
lwip中的进程就是ucos中的任务,创建一个新进程的代码如下:
#define LWIP_STK_SIZE10*1024//和tcp/ip相关任务的堆栈大小.可以根据情况自
//己设置,44b0开发板上有8M的sdram,所以设大
//一点也没有关系:)
//max number of lwip tasks
#define LWIP_TASK_MAX5 //和tcp/ip相关的任务最多数目
//first prio of lwip tasks
#define LWIP_START_PRIO5 //和tcp/ip相关任务的起始优先级,在本例中优先级可
//以从(5-9).注意tcpip_thread在所有tcp/ip相关进程中//应该是优先级最高的.在本例中就是优先级5
//如果用户需要创建和tcp/ip无关任务,如uart任务等,
//不要使用5-9的优先级
OS_STK LWIP_TASK_STK[LWIP_TASK_MAX][LWIP_STK_SIZE];//和tcp/ip相关进程
//的堆栈区
u8_t curr_prio_offset ;
sys_thread_t sys_thread_new(void (* function)(void *arg), void *arg, int prio)
{
if (curr_prio_offset < LWIP_TASK_MAX) {
OSTaskCreate(function, (void*)0x1111, &LWIP_TASK_STK[curr_prio_offset][LWIP_STK_SIZE - 1],
LWIP_START_PRIO + curr_prio_offset );
curr_prio_offset++;
return 1;
}
else {
// PRINT(" lwip task prio out of range ! error! ");
}
}
从代码中可以看出tcpip_thread应该是最先创建的.
2.2.3 Lwip中的定时事件
在tcp/ip协议中很多时候都要用到定时,定时的实现也是tcp/ip协议栈中一个重要的部分.lwip中定时事件的数据结构如下.
struct sys_timeout {
struct sys_timeout *next;//指向下一个定时结构
u32_t time;//定时时间
sys_timeout_handler h;//定时时间到后执行的函数
void *arg;//定时时间到后执行函数的参数.
};
struct sys_timeouts {
struct sys_timeout *next;
};
struct sys_timeouts lwip_timeouts[LWIP_TASK_MAX];
Lwip中的定时事件表的结构如下图,每个和tcp/ip相关的任务的一系列定时事件组成一个单向链表.每个链表的起始指针存在lwip_timeouts的对应表项中.
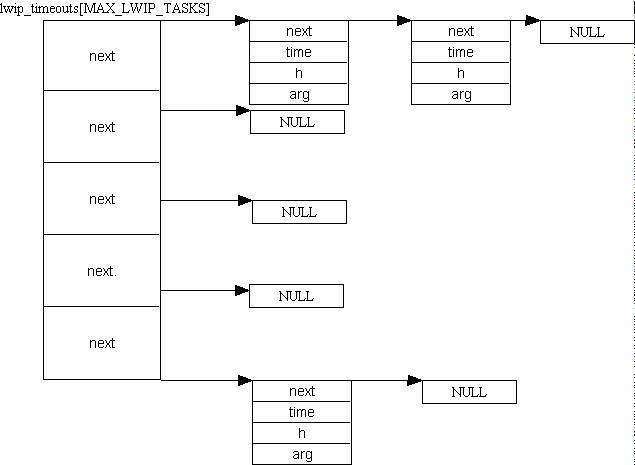
函数sys_arch_timeouts返回对应于当前任务的指向定时事件链表的起始指针.该指针存在lwip_timeouts[MAX_LWIP_TASKS]中.
struct sys_timeouts null_timeouts;
struct sys_timeouts * sys_arch_timeouts(void)
{
u8_t curr_prio;
s16_t err, offset;
OS_TCB curr_task_pcb;
null_timeouts.next = NULL;
//获取当前任务的优先级
err = OSTaskQuery(OS_PRIO_SELF, &curr_task_pcb);
curr_prio = curr_task_pcb.OSTCBPrio;
offset = curr_prio - LWIP_START_PRIO;
//判断当前任务优先级是不是tcp/ip相关任务,优先级5-9
if (offset < 0 || offset >= LWIP_TASK_MAX) {
return &null_timeouts;
}
return &lwip_timeouts[offset];
}
注意:杨晔大侠移植的代码在本函数有一个bug.杨晔大侠的移植把上面函数中的OS_TCB curr_task_tcb定义成了全局变量,使本函数成为了一个不可重入函数.我也是在进行如下测试时发现了这个bug.我的开发板上设置的ip地址是 192.168.1.95.我在windows的dos窗口内运行
ping 192.168.1.95 –l 2000 –t,不间断用长度为2000的数据报进行ping测试,同时使用tftp客户端软件给192.168.1.95下载一个十几兆程序,同时再使用 telnet连接192.168.1.95端口7(echo端口),往该端口写数测试echo功能.
在运行一段时间以后,开发板进入不再响应.我当时也是经过长时间的分析才发现是因为在低优先级任务运行ys_arch_timeouts()时被高优先级任务打断改写了 curr_task_tcb的值,从而使sys_arch_timeouts返回的指针错误,进而导致系统死锁.函数sys_timeout给当前任务增加一个定时事件:
void sys_timeout(u32_t msecs, sys_timeout_handler h, void *arg)
{
struct sys_timeouts *timeouts;
struct sys_timeout *timeout, *t;
timeout = memp_malloc(MEMP_SYS_TIMEOUT);//为定时事件分配内存
if (timeout == NULL) {
return;
}
timeout->next = NULL;
timeout->h = h;
timeout->arg = arg;
timeout->time = msecs;
timeouts = sys_arch_timeouts();//返回当前任务定时事件链表起始指针
if (timeouts->next == NULL) {//如果链表为空直接增加该定时事件
timeouts->next = timeout;
return;
}
//如果链表不为空,对定时事件进行排序.注意定时事件中的time存储的是本事件
//时间相对于前一事件的时间的差值
if (timeouts->next->time > msecs) {
timeouts->next->time -= msecs;
timeout->next = timeouts->next;
timeouts->next = timeout;
}
else {
for (t = timeouts->next; t != NULL; t = t->next) {
timeout->time -= t->time;
if (t->next == NULL ||
t->next->time > timeout->time) {
if (t->next != NULL) {
t->next->time -= timeout->time;
}
timeout->next = t->next;
t->next = timeout;
break;
}
}
}
}
函数sys_untimeout从当前任务定时事件链表中删除一个定时事件
void sys_untimeout(sys_timeout_handler h, void *arg)
{
struct sys_timeouts *timeouts;
struct sys_timeout *prev_t, *t;
timeouts = sys_arch_timeouts();//返回当前任务定时事件链表起始指针
if (timeouts->next == NULL) { //如果链表为空直接返回
return;
}
//查找对应定时事件并从链表中删除.
for (t = timeouts->next, prev_t = NULL; t != NULL; prev_t = t, t = t->next) {
if ((t->h == h) && (t->arg == arg)) {
/* We have a match */
/* Unlink from previous in list */
if (prev_t == NULL)
timeouts->next = t->next;
else
prev_t->next = t->next;
/* If not the last one, add time of this one back to next */
if (t->next != NULL)
t->next->time += t->time;
memp_free(MEMP_SYS_TIMEOUT, t);
return;
}
}
return;
}
2.2.3“mbox”的实现:
(1)mbox的创建
sys_mbox_t sys_mbox_new(void)
{
u8_tucErr;
PQ_DESCRpQDesc;
//从消息队列内存分区中得到一个内存块
pQDesc = OSMemGet( pQueueMem, &ucErr );
if ( ucErr == OS_NO_ERR ) {
//创建一个消息队列
pQDesc->pQ = OSQCreate(&(pQDesc->pvQEntries[0]), MAX_QUEUE_ENTRIES );
if ( pQDesc->pQ != NULL ) {
return pQDesc;
}
}
return SYS_MBOX_NULL;
}
(2)发一条消息给”mbox”
const void * const pvNullPointer = 0xffffffff;
void sys_mbox_post(sys_mbox_t mbox, void *data)
{
INT8U err;
if ( !data )
data = (void*)&pvNullPointer;
err = OSQPost( mbox->pQ, data);
}
在ucos 中,如果OSQPost (OS_EVENT *pevent, void *msg)中的msg==NULL 会返回一条OS_ERR_POST_NULL_PTR错误.而在lwip中会调用sys_mbox_post(mbox,NULL)发送一条空消息,我们在本函数中把NULL变成一个常量指针0xffffffff.
(3)从”mbox”中读取一条消息
#define SYS_ARCH_TIMEOUT 0xffffffff
void sys_mbox_fetch(sys_mbox_t mbox, void **msg)
{
u32_t time;
struct sys_timeouts *timeouts;
struct sys_timeout *tmptimeout;
sys_timeout_handler h;
void *arg;
again:
timeouts = sys_arch_timeouts();////返回当前任务定时事件链表起始指针
if (!timeouts || !timeouts->next) {//如果定时事件链表为空
sys_arch_mbox_fetch(mbox, msg, 0);//无超时等待消息
}
else {
if (timeouts->next->time > 0) {
//如果超时事件链表不为空,而且第一个超时事件的time !=0
//带超时等待消息队列,超时时间等于超时事件链表中第一个超时事件的time,
time = sys_arch_mbox_fetch(mbox, msg, timeouts->next->time);
//在后面分析中可以看到sys_arch_mbox_fetch调用了ucos中的OSQPend系统调
//用从消息队列中读取消息.
//如果”mbox”消息队列不为空,任务立刻返回,否则任务进入阻塞态.
//需要重点说明的是sys_arch_mbox_fetch的返回值time:如果sys_arch_mbox_fetch
//因为超时返回,time=SYS_ARCH_TIMEOUT,
//如果sys_arch_mbox_fetch因为收到消息而返回,
//time = 收到消息时刻的时间-执行sys_arch_mbox_fetch时刻的时间,单位是毫秒
//由于在ucos中任务调用OSQPend系统调用进入阻塞态,到收到消息重新开始执行
//这段时间没有记录下来,所以我们要简单修改ucos的源代码.(后面我们会看到).
}
else {
//如果定时事件链表不为空,而且第一个定时事件的time ==0,表示该事件的定时
//时间到
time = SYS_ARCH_TIMEOUT;
}
if (time == SYS_ARCH_TIMEOUT) {
//一个定时事件的定时时间到
tmptimeout = timeouts->next;
timeouts->next = tmptimeout->next;
h = tmptimeout->h;
arg = tmptimeout->arg;
memp_free(MEMP_SYS_TIMEOUT, tmptimeout);
//从内存中释放该定时事件,并执行该定时事件中的函数
if (h != NULL) {
h(arg);
}
//因为定时事件中的定时时间到或者是因为sys_arch_mbo_fetch超时到而执行到
//这里,返回本函数开头重新等待mbox的消息
goto again;
}
else {
//如果sys_arch_mbox_fetch无超时收到消息返回
//则刷新定时事件链表中定时事件的time值.
if (time <= timeouts->next->time) {
timeouts->next->time -= time;
}
else {
timeouts->next->time = 0;
}
}
}
}
u32_tsys_arch_mbox_fetch(sys_mbox_t mbox, void **data, u32_t timeout)
{
u32_tucErr;
u16_t ucos_timeout;
//在 lwip中 ,timeout的单位是ms
// 在ucosII ,timeout 的单位是timer tick
ucos_timeout = 0;
if (timeout != 0) {
ucos_timeout = (timeout ) * ( OS_TICKS_PER_SEC / 1000);
if (ucos_timeout < 1)
ucos_timeout = 1;
else if (ucos_timeout > 65535)
ucos_timeout = 65535;
}
//如果data!=NULL就返回消息指针,
if (data != NULL) {
*data = OSQPend( mbox->pQ, (u16_t)ucos_timeout, &ucErr );
}
else {
OSQPend(mbox->pQ, (u16_t)ucos_timeout, &ucErr);
}
//这里修改了ucos中的OSQPend系统调用,
//原来的void*OSQPend (OS_EVENT *pevent, INT16U timeout, INT8U *err)
// err的返回值只有两种:收到消息就返回OS_NO_ERR,超时则返回OS_TIMEOUT
//这里先将err从8位数据改变成了16位数据 OSQPend(*pevent,timeout, INT16U *err)
//重新定义了OS_TIMEOUT
//在ucos中原有#define OS_TIMEOUT 20
//改为 #defineOS_TIMEOUT-1
//err返回值的意义也改变了,如果超时返回OS_TIMEOUT
// 如果收到消息,则返回OSTCBCur->OSTCBDly修改部分代码如下
//if (msg != (void *)0) { /* Did we get a message?*/
// OSTCBCur->OSTCBMsg = (void *)0;
// OSTCBCur->OSTCBStat= OS_STAT_RDY;
// OSTCBCur->OSTCBEventPtr = (OS_EVENT *)0;
// *err = OSTCBCur->OSTCBDly;// zhangzs @2003.12.12
//OS_EXIT_CRITICAL();
// return (msg);/* Return message received */
//}
//关于ucos的OSTBCur->OSTCBDly的含义请查阅ucos的书籍
if ( ucErr == OS_TIMEOUT ) {
timeout = SYS_ARCH_TIMEOUT;
}
else {
if (*data == (void*)&pvNullPointer )
*data = NULL;
//单位转换,从ucos tick->ms
timeout = (ucos_timeout - ucErr) * (1000 / OS_TICKS_PER_SEC);
}
return timeout;
}
semaphone的实现和mbox类似,这里就不再重复了.
-
 热敏电阻温度阻值查询程序2024年11月13日 74
热敏电阻温度阻值查询程序2024年11月13日 74 -
C99语法规则2024年11月16日 675
-
 FreeRTOS 动态内存管理2024年11月12日 448
FreeRTOS 动态内存管理2024年11月12日 448 -
一款常用buffer程序2024年11月06日 88
-
 1602液晶显示模块的应用2012年08月03日 192
1602液晶显示模块的应用2012年08月03日 192 -
GNU C 9条扩展语法2024年11月18日 261
-
 如何实现STM32F407单片机的ADC转换2024年11月15日 300
如何实现STM32F407单片机的ADC转换2024年11月15日 300 -
 STM32使用中断屏蔽寄存器BASEPRI保护临界段2024年11月15日 195
STM32使用中断屏蔽寄存器BASEPRI保护临界段2024年11月15日 195
-
C99语法规则2024年11月16日 675
-
 51单片机LED16*16点阵滚动显示2012年09月05日 664
51单片机LED16*16点阵滚动显示2012年09月05日 664 -
FreeRTOS 动态内存管理2024年11月12日 448
-
 ARM9远程图像无线监控系统2012年07月03日 424
ARM9远程图像无线监控系统2012年07月03日 424 -
 用单片机模拟2272软件解码2012年09月06日 300
用单片机模拟2272软件解码2012年09月06日 300 -
如何实现STM32F407单片机的ADC转换2024年11月15日 300
-
 新颖的单片机LED钟2012年08月06日 278
新颖的单片机LED钟2012年08月06日 278 -
GNU C 9条扩展语法2024年11月18日 261