
ModBus常用功能码和PLC地址位对应关系
2024-11-26
104
功能码描述PLC地址位寄存器地址位位/字操作操作数量01H读线圈寄存器00001-099990000H-FFFFH位操作单个或多个02H读离散输入寄存器10001-199990000H-FFFFH位操作单个或多个03H读保持寄存器40001-499990000H-FFFFH字操作单个或多个04H读输入寄存器30001-399990000H-FFFFH字操作单个或多个05H写单个线圈 ..
[查看全文]
可编程高精度测温集成电路LM76
2024-11-13
38
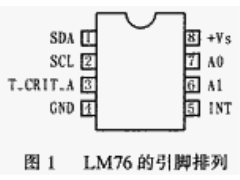
1 概述LM76是一个由数字温度传感器、I2C串行总线接口和温度窗口比较器组成的集成电路。在70℃~100℃和-10℃~+45℃的温度范围内,其窗口比较器的串行总线接口的精度为±1℃。在25℃时,LM76CHM的精度可达±0.5℃。它的开漏中断输出(INT)在温度超过可编程窗口温度时被激活,温度超限警报输出(T-CRIT-A)在温度超过 ..
[查看全文]
无线传感器网络的研究
2013-04-05
孙利民 方贵明 刘燕
14
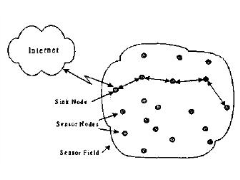
1.引言 随着微电子技术、通信技术和传感器技术的发展,使得能够在微小传感器内集成信息采集、数据处理和无线通信等多种功能。传感器网络就是由大量的微型低功耗的传感器节点组成的网络系统,每个传感器节点具有数据采集、简单的数据处理、短距离无线通信和自动组网的能力。 与无线自组网、蜂窝等无线网络相比,无线传感器网络 ..
[查看全文]
PID控制C源程序
2013-04-03
15
PID控制C源程序,可以参考一下struct _pid { int pv; /*integer that contains the process value*/ int sp; /*integer that contains the set point*/ float integral; float pgain; float igain; float dgain; int deadband; int last_error; }; struct _pid warm, *pid; int process_point, set_point, dead_band; fl ..
[查看全文]
简单实用的恒温控制器
2013-03-22
17
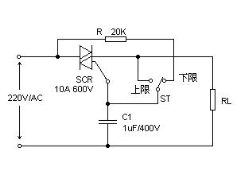
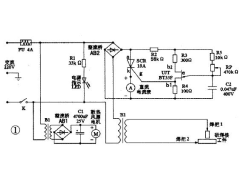
该电路虽简单,却可以达到控制效果。电路见图示。 工作原理如下:ST是WTQ-288型电接点压力式温度计,当恒温箱内的温度降低到下限时,ST的指针与下限接点接触,双向可控硅通过R被强制触发导通,接通加热器RL的电源,于是恒温箱内温度上升。ST的指针转动,与下限触点脱离。这时虽然触发回路已断开,但由于电容C的移相作用 ..
[查看全文]
铂电阻测温仪的设计与实现
2013-03-21
王小飞 袁涛 张铁冰
37
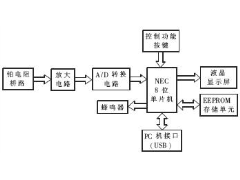
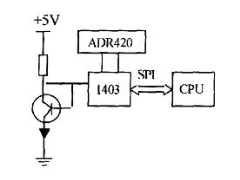
摘要:介绍了铂电阻测温仪的硬件及软件设计,并针对不平衡电桥中以及铂电阻的阻值和温度之间的非线性特性给温度测量带来一定的误差这一缺点,给出一种查表线性化的方法,实现了电路参数的自适应选取,使得误差达到了0.5级仪表的要求。 铂电阻温度传感器[1]是利用其电阻和温度成一定函数关系而制成的温度传感器,由于其测量准确度 ..
[查看全文]
基于铂电阻的温度传感器设计
2013-03-09
23
1.简介 温度是过程检测与控制中的重要参量,在要求对温度进行精确测量和控制的条件下,铂热电阻是一种应用广泛的温度传感器,它具有体积小、准确度高、测温范围宽、稳定性好、正的温度系数等特点,但它同时也存在非线性的缺点,因此在利用铂热电阻进行精确温度测量时,除要克服测量电路自身的噪声干扰外,还要对铂热电阻的非线性进 ..
[查看全文]
铂电阻的A/D非线性校正
2012-12-30
李纲民
39
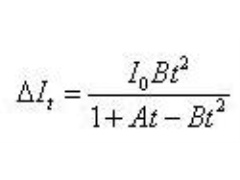
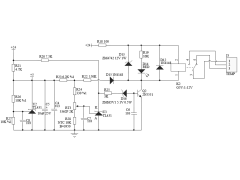
摘要: 提出了四线制铂电阻在测量过程中通过硬件设计进行电阻温度之间非线性校正的一种方法,给出了相应的校正电路和实验数据. 该方法具有电路简单,使用方便,测量精度较高等特点. 也可将其应用到其他具有类似关系的传感器的非线性校正中. 温度检测是工业生产和日常生活中常见的参数检测,温度敏感元件既有传统的热电阻、热电偶、 ..
[查看全文]
pt100温度传感器测量电路
2012-12-12
26
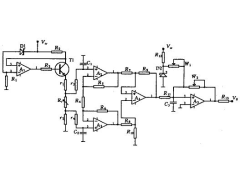
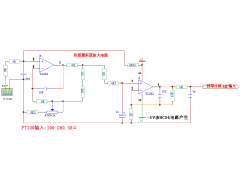
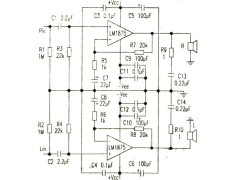
温度传感器PT100是一种稳定性和线性都比较好的铂丝热电阻传感器,可以工作在 -200℃ 至 650℃ 的范围.本电路选择其工作在 -19℃ 至 500℃ 范围.整个电路分为两部分,一是传感器前置放大电路,一是单片机 A/D 转换和显示,控制,软件非线性校正等部分.前置放大部分原理图如下: 工作原理:传感器的接入非常简单,从系统的 5V 供电端仅 ..
[查看全文]
K型热电偶冷端补偿方案
2012-12-04
郭锐 徐玉斌
25
1 引言在SMT 行业中为满足自动化大批量生产的需要,绝大多数企业采用隧道式连续传送结构的回流焊炉。这种回流焊炉普遍至少具有3 个温区。由于印制板上的温度变化远比仪表的显示温度复杂得多,因此对于回流焊炉操作者来说只凭经验,很难在短时间内把这种回流焊炉的温度和传动速度调节到最佳状态。因此,须将细丝状K型热电偶的探 ..
[查看全文]
推荐文章
-
 一款高温报警电路2024年11月13日 116
一款高温报警电路2024年11月13日 116 -
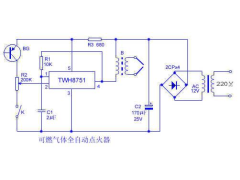 可燃气体全自动点火器2012年09月22日 90
可燃气体全自动点火器2012年09月22日 90 -
 LED参数与特性2012年09月18日 136
LED参数与特性2012年09月18日 136 -
 RC振荡电路的几种接法2012年09月10日 250
RC振荡电路的几种接法2012年09月10日 250 -
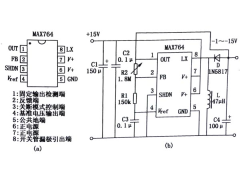 MAX764极性反转电路2012年08月24日 59
MAX764极性反转电路2012年08月24日 59 -
 实用恒流充电器2012年08月18日 188
实用恒流充电器2012年08月18日 188
最新文章
-
 NTC热敏电阻2025年11月12日 74
NTC热敏电阻2025年11月12日 74 -
ModBus常用功能码和PLC地址位对应关系2024年11月26日 104
-
常用物质金属非金属的电阻率、导电率明细表2024年11月23日 8135
-
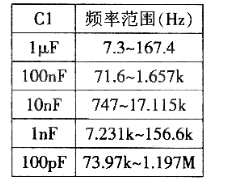 多种波形信号发生器2024年11月22日 44
多种波形信号发生器2024年11月22日 44 -
PT100分度表2024年11月22日 75
-
K型热电偶分度表2024年11月22日 80
热门文章
-
常用物质金属非金属的电阻率、导电率明细表2024年11月23日 8135
-
 自制微型交流电焊机2012年07月14日 1155
自制微型交流电焊机2012年07月14日 1155 -
 声光控延时开关的制作2024年07月06日 931
声光控延时开关的制作2024年07月06日 931 -
 用LM1875替找TDA20302012年09月15日 788
用LM1875替找TDA20302012年09月15日 788 -
 6N3+LM4780功放制作2012年09月13日 670
6N3+LM4780功放制作2012年09月13日 670 -
 小型太阳能供电板的制作2012年09月08日 667
小型太阳能供电板的制作2012年09月08日 667