RS232接收模块
下面是我们想要实现的模块:
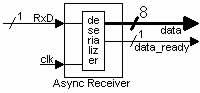
我们的设计目的是这样的:
1.当RxD线上有数据时,接收模块负责识别RxD线上的数据
2.当收到一个字节的数据时,锁存接收到的数据到"data"总线,并使"data_ready"有效一个周期。
注意:只有当"data_ready"有效时,"data"总线的数据才有效,其他的时间里不要使用"data"总线上的数据,因为新的数据可能已经改变了其中的部分数据。
过采样
异步接收机必须通过一定的机制与接收到的输入信号同步(接收端没有办法得到发送断的时钟)。这里采用如下办法。
1.为了确定新数据的到来,即检测开始位,我们使用几倍于波特率的采样时钟对接收到的信号进行采样。
2.一旦检测到"开始位",再将采样时钟频率降为已知的发送端的波特率。
典型的过采样时钟频率为接收到的信号的波特率的16倍,这里我们使用8倍的采样时钟。当波特率为115200时,采样时钟为921600Hz。
假设我们已经有了一个8倍于波特率的时钟信号 "Baud8Tick",其频率为 921600Hz。
具体设计
首先,接受到的"RxD"信号与我们的时钟没有任何关系,所以采用两个D触发器对其进行过采样,并且使之我我们的时钟同步。
reg [1:0] RxD_sync;
always @(posedge clk) if(Baud8Tick) RxD_sync <= {RxD_sync[0], RxD};
首先我们对接收到的数据进行滤波,这样可以防止毛刺信号被误认为是开始信号。
reg [1:0] RxD_cnt;
reg RxD_bit;
always @(posedge clk)
if(Baud8Tick)
begin
if(RxD_sync[1] && RxD_cnt!=2'b11) RxD_cnt <= RxD_cnt + 1;
else
if(~RxD_sync[1] && RxD_cnt!=2'b00) RxD_cnt <= RxD_cnt - 1;
if(RxD_cnt==2'b00) RxD_bit <= 0;
else
if(RxD_cnt==2'b11) RxD_bit <= 1;
end
一旦检测到"开始位",使用如下的状态机可以检测出接收到每一位数据。
reg [3:0] state;
always @(posedge clk)
if(Baud8Tick)
case(state)
4'b0000: if(~RxD_bit) state <= 4'b1000; // start bit found?
4'b1000: if(next_bit) state <= 4'b1001; // bit 0
4'b1001: if(next_bit) state <= 4'b1010; // bit 1
4'b1010: if(next_bit) state <= 4'b1011; // bit 2
4'b1011: if(next_bit) state <= 4'b1100; // bit 3
4'b1100: if(next_bit) state <= 4'b1101; // bit 4
4'b1101: if(next_bit) state <= 4'b1110; // bit 5
4'b1110: if(next_bit) state <= 4'b1111; // bit 6
4'b1111: if(next_bit) state <= 4'b0001; // bit 7
4'b0001: if(next_bit) state <= 4'b0000; // stop bit
default: state <= 4'b0000;
endcase
注意,我们使用了"next_bit" 来遍历所有数据位。
reg [2:0] bit_spacing;
always @(posedge clk)
if(state==0)
bit_spacing <= 0;
else
if(Baud8Tick)
bit_spacing <= bit_spacing + 1;
wire next_bit = (bit_spacing==7);
最后我们使用一个移位寄存器来存储接受到的数据。
reg [7:0] RxD_data;
always @(posedge clk) if(Baud8Tick && next_bit && state[3]) RxD_data <= {RxD_bit, RxD_data[7:1]};
-
 热敏电阻温度阻值查询程序2024年11月13日 74
热敏电阻温度阻值查询程序2024年11月13日 74 -
C99语法规则2024年11月16日 675
-
 FreeRTOS 动态内存管理2024年11月12日 448
FreeRTOS 动态内存管理2024年11月12日 448 -
一款常用buffer程序2024年11月06日 88
-
 1602液晶显示模块的应用2012年08月03日 192
1602液晶显示模块的应用2012年08月03日 192 -
GNU C 9条扩展语法2024年11月18日 261
-
 如何实现STM32F407单片机的ADC转换2024年11月15日 300
如何实现STM32F407单片机的ADC转换2024年11月15日 300 -
 STM32使用中断屏蔽寄存器BASEPRI保护临界段2024年11月15日 195
STM32使用中断屏蔽寄存器BASEPRI保护临界段2024年11月15日 195
-
C99语法规则2024年11月16日 675
-
 51单片机LED16*16点阵滚动显示2012年09月05日 664
51单片机LED16*16点阵滚动显示2012年09月05日 664 -
FreeRTOS 动态内存管理2024年11月12日 448
-
 ARM9远程图像无线监控系统2012年07月03日 424
ARM9远程图像无线监控系统2012年07月03日 424 -
 用单片机模拟2272软件解码2012年09月06日 300
用单片机模拟2272软件解码2012年09月06日 300 -
如何实现STM32F407单片机的ADC转换2024年11月15日 300
-
 新颖的单片机LED钟2012年08月06日 278
新颖的单片机LED钟2012年08月06日 278 -
GNU C 9条扩展语法2024年11月18日 261