SD卡在现在的日常生活与工作中使用非常广泛,时下已经成为最为通用的数据存储卡。在诸如MP3、数码相机等设备上也都采用SD卡作为其存储设备。SD卡之所以得到如此广泛的使用,是因为它价格低廉、存储容量大、使用方便、通用性与安全性强等优点。既然它有着这么多优点,那么如果将它加入到单片机应用开发系统中来,将使系统变得更加出色。这就要求对SD卡的硬件与读写时序进行研究。对于SD卡的硬件结构,在官方的文档上有很详细的介绍,如SD卡内的存储器结构、存储单元组织方式等内容。要实现对它的读写,最核心的是它的时序,笔者在经过了实际的测试后,使用51单片机成功实现了对SD卡的扇区读写,并对其读写速度进行了评估。下面先来讲解SD卡的读写时序。
(1) SD卡的引脚定义
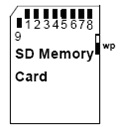
SD卡引脚功能详述:
引脚
编号 |
SD模式 |
SPI模式 |
||||
名称 |
类型 |
描述 |
名称 |
类型 |
描述 |
|
1 |
CD/DAT3 |
IO或PP |
卡检测/
数据线3 |
#CS |
I |
片选 |
2 |
CMD |
PP |
命令/
回应 |
DI |
I |
数据输入 |
3 |
VSS1 |
S |
电源地 |
VSS |
S |
电源地 |
4 |
VDD |
S |
电源 |
VDD |
S |
电源 |
5 |
CLK |
I |
时钟 |
SCLK |
I |
时钟 |
6 |
VSS2 |
S |
电源地 |
VSS2 |
S |
电源地 |
7 |
DAT0 |
IO或PP |
数据线0 |
DO |
O或PP |
数据输出 |
8 |
DAT1 |
IO或PP |
数据线1 |
RSV |
||
9 |
DAT2 |
IO或PP |
数据线2 |
RSV |
||
注:S:电源供给 I:输入 O:采用推拉驱动的输出
PP:采用推拉驱动的输入输出
SD卡SPI模式下与单片机的连接图:
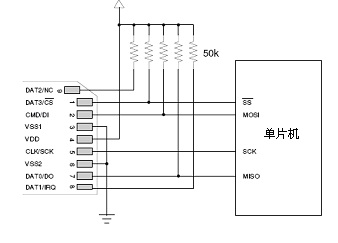
SD卡支持两种总线方式:SD方式与SPI方式。其中SD方式采用6线制,使用CLK、CMD、DAT0~DAT3进行数据通信。而SPI方式采用4线制,使用CS、CLK、DataIn、DataOut进行数据通信。SD方式时的数据传输速度与SPI方式要快,采用单片机对SD卡进行读写时一般都采用SPI模式。采用不同的初始化方式可以使SD卡工作于SD方式或SPI方式。这里只对其SPI方式进行介绍。
(2)SPI方式驱动SD卡的方法
SD卡的SPI通信接口使其可以通过SPI通道进行数据读写。从应用的角度来看,采用SPI接口的好处在于,很多单片机内部自带SPI控制器,不光给开发上带来方便,同时也见降低了开发成本。然而,它也有不好的地方,如失去了SD卡的性能优势,要解决这一问题,就要用SD方式,因为它提供更大的总线数据带宽。SPI接口的选用是在上电初始时向其写入第一个命令时进行的。以下介绍SD卡的驱动方法,只实现简单的扇区读写。
1) 命令与数据传输
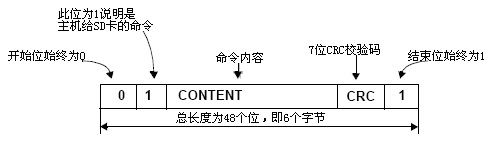
1. 命令传输
SD卡自身有完备的命令系统,以实现各项操作。命令格式如下:
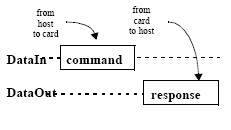
命令的传输过程采用发送应答机制,过程如下:
每一个命令都有自己命令应答格式。在SPI模式中定义了三种应答格式,如下表所示:
字节 |
位 |
含义 |
1 |
7 |
开始位,始终为0 |
6 |
参数错误 |
|
5 |
地址错误 |
|
4 |
擦除序列错误 |
|
3 |
CRC错误 |
|
2 |
非法命令 |
|
1 |
擦除复位 |
|
0 |
闲置状态 |
字节 |
位 |
含义 |
1 |
7 |
开始位,始终为0 |
6 |
参数错误 |
|
5 |
地址错误 |
|
4 |
擦除序列错误 |
|
3 |
CRC错误 |
|
2 |
非法命令 |
|
1 |
擦除复位 |
|
0 |
闲置状态 |
|
2 |
7 |
溢出,CSD覆盖 |
6 |
擦除参数 |
|
5 |
写保护非法 |
|
4 |
卡ECC失败 |
|
3 |
卡控制器错误 |
|
2 |
未知错误 |
|
1 |
写保护擦除跳过,锁/解锁失败 |
|
0 |
锁卡 |
字节 |
位 |
含义 |
1 |
7 |
开始位,始终为0 |
6 |
参数错误 |
|
5 |
地址错误 |
|
4 |
擦除序列错误 |
|
3 |
CRC错误 |
|
2 |
非法命令 |
|
1 |
擦除复位 |
|
0 |
闲置状态 |
|
2~5 |
全部 |
操作条件寄存器,高位在前 |
写命令的例程:
//-------------------------------------------------------------------------
向SD卡中写入命令,并返回回应的第二个字节
//-------------------------------------------------------------------------
unsigned char Write_Command_SD(unsigned char *CMD)
{
unsigned char tmp;
unsigned char retry = 0;
unsigned char i;
//禁止SD卡片选
SPI_CS = 1;
//发送8个时钟信号
Write_Byte_SD(0xFF);
//使能SD卡片选
SPI_CS = 0;
//向SD卡发送6字节命令
for (i = 0; i < 0x06; i++) {
Write_Byte_SD(*CMD++);
}
//获得16位的回应
Read_Byte_SD(); //read the first byte,ignore it.
do {
//读取后8位
tmp = Read_Byte_SD();
retry++;
}
while ((tmp == 0xff)& & (retry < 100));
return (tmp);
}
2) 初始化
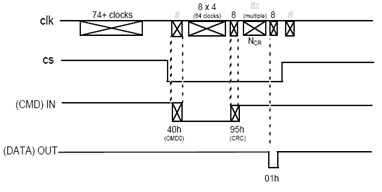
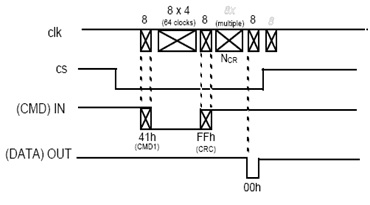
SD卡的初始化是非常重要的,只有进行了正确的初始化,才能进行后面的各项操作。在初始化过程中,SPI的时钟不能太快,否则会造初始化失败。在初始化成功后,应尽量提高SPI的速率。在刚开始要先发送至少74个时钟信号,这是必须的。在很多读者的实验中,很多是因为疏忽了这一点,而使初始化不成功。随后就是写入两个命令CMD0与CMD1,使SD卡进入SPI模式
初始化时序图:
初始化例程:
//----------------------------------------------------------
初始化SD卡到SPI模式
//----------------------------------------------------------
unsigned char SD_Init()
{
unsigned char retry, temp;
unsigned char i;
unsigned char CMD[] = {0x40, 0x00, 0x00, 0x00, 0x00, 0x95};
SD_Port_Init(); //初始化驱动端口
Init_Flag = 1; //将初始化标志置1
for (i = 0; i < 0x0f; i++) {
Write_Byte_SD(0xff); //发送至少74个时钟信号
}
//向SD卡发送CMD0
retry = 0;
do {
//为了能够成功写入CMD0,在这里写200次
temp = Write_Command_SD(CMD);
retry++;
if (retry == 200) {
//超过200次
return (INIT_CMD0_ERROR); //CMD0 Error!
}
}
while (temp != 1); //回应01h,停止写入
//发送CMD1到SD卡
CMD[0] = 0x41; //CMD1
CMD[5] = 0xFF;
retry = 0;
do {
//为了能成功写入CMD1,写100次
temp = Write_Command_SD(CMD);
retry++;
if (retry == 100) {
//超过100次
return (INIT_CMD1_ERROR); //CMD1 Error!
}
}
while (temp != 0); //回应00h停止写入
Init_Flag = 0; //初始化完毕,初始化标志清零
SPI_CS = 1; //片选无效
return (0); //初始化成功
}
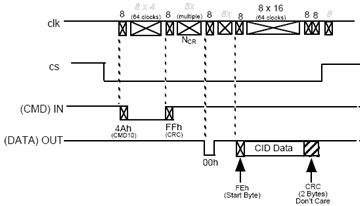
3) 读取CID
CID寄存器存储了SD卡的标识码。每一个卡都有唯一的标识码。
CID寄存器长度为128位。它的寄存器结构如下:
名称 |
域 |
数据宽度 |
CID划分 |
生产标识号 |
MID |
8 |
[127:120] |
OEM/应用标识 |
OID |
16 |
[119:104] |
产品名称 |
PNM |
40 |
[103:64] |
产品版本 |
PRV |
8 |
[63:56] |
产品序列号 |
PSN |
32 |
[55:24] |
保留 |
- |
4 |
[23:20] |
生产日期 |
MDT |
12 |
[19:8] |
CRC7校验合 |
CRC |
7 |
[7:1] |
未使用,始终为1 |
- |
1 |
[0:0] |
它的读取时序如下:
与此时序相对应的程序如下:
//------------------------------------------------------------
读取SD卡的CID寄存器 16字节 成功返回0
//------------------------------------------------------------
unsigned char Read_CID_SD(unsigned char *Buffer)
{
//读取CID寄存器的命令
unsigned char CMD[] = {0x4A, 0x00, 0x00, 0x00, 0x00, 0xFF};
unsigned char temp;
temp = SD_Read_Block(CMD, Buffer, 16); //read 16 bytes
return (temp);
}
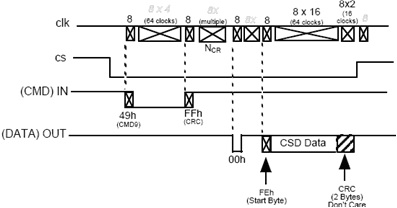
4)读取CSD
CSD(Card-Specific Data)寄存器提供了读写SD卡的一些信息。其中的一些单元可以由用户重新编程。具体的CSD结构如下:
名称 |
域 |
数据宽度 |
单元类型 |
CSD划分 |
CSD结构 |
CSD_STRUCTURE |
2 |
R |
[127:126] |
保留 |
- |
6 |
R |
[125:120] |
数据读取时间1 |
TAAC |
8 |
R |
[119:112] |
数据在CLK周期内读取时间2(NSAC*100) |
NSAC |
8 |
R |
[111:104] |
最大数据传输率 |
TRAN_SPEED |
8 |
R |
[103:96] |
卡命令集合 |
CCC |
12 |
R |
[95:84] |
最大读取数据块长 |
READ_BL_LEN |
4 |
R |
[83:80] |
允许读的部分块 |
READ_BL_PARTIAL |
1 |
R |
[79:79] |
非线写块 |
WRITE_BLK_MISALIGN |
1 |
R |
[78:78] |
非线读块 |
READ_BLK_MISALIGN |
1 |
R |
[77:77] |
DSR条件 |
DSR_IMP |
1 |
R |
[76:76] |
保留 |
- |
2 |
R |
[75:74] |
设备容量 |
C_SIZE |
12 |
R |
[73:62] |
最大读取电流@VDD min |
VDD_R_CURR_MIN |
3 |
R |
[61:59] |
最大读取电流@VDD max |
VDD_R_CURR_MAX |
3 |
R |
[58:56] |
最大写电流@VDD min |
VDD_W_CURR_MIN |
3 |
R |
[55:53] |
最大写电流@VDD max |
VDD_W_CURR_MAX |
3 |
R |
[52:50] |
设备容量乘子 |
C_SIZE_MULT |
3 |
R |
[49:47] |
擦除单块使能 |
ERASE_BLK_EN |
1 |
R |
[46:46] |
擦除扇区大小 |
SECTOR_SIZE |
7 |
R |
[45:39] |
写保护群大小 |
WP_GRP_SIZE |
7 |
R |
[38:32] |
写保护群使能 |
WP_GRP_ENABLE |
1 |
R |
[31:31] |
保留 |
- |
2 |
R |
[30:29] |
写速度因子 |
R2W_FACTOR |
3 |
R |
[28:26] |
最大写数据块长度 |
WRITE_BL_LEN |
4 |
R |
[25:22] |
允许写的部分部 |
WRITE_BL_PARTIAL |
1 |
R |
[21:21] |
保留 |
- |
5 |
R |
[20:16] |
文件系统群 |
FILE_OFRMAT_GRP |
1 |
R/W |
[15:15] |
拷贝标志 |
COPY |
1 |
R/W |
[14:14] |
永久写保护 |
PERM_WRITE_PROTECT |
1 |
R/W |
[13:13] |
暂时写保护 |
TMP_WRITE_PROTECT |
1 |
R/W |
[12:12] |
文件系统 |
FIL_FORMAT |
2 |
R/W |
[11:10] |
保留 |
- |
2 |
R/W |
[9:8] |
CRC |
CRC |
7 |
R/W |
[7:1] |
未用,始终为1 |
- |
1 |
[0:0] |
读取CSD 的时序:
相应的程序例程如下:
//-------------------------------------------------------------------
读SD卡的CSD寄存器 共16字节 返回0说明读取成功
//-------------------------------------------------------------------
unsigned char Read_CSD_SD(unsigned char *Buffer)
{
//读取CSD寄存器的命令
unsigned char CMD[] = {0x49, 0x00, 0x00, 0x00, 0x00, 0xFF};
unsigned char temp;
temp = SD_Read_Block(CMD, Buffer, 16); //read 16 bytes
return (temp);
}
4) 读取SD卡信息
综合上面对CID与CSD寄存器的读取,可以知道很多关于SD卡的信息,以下程序可以获取这些信息。如下:
//----------------------------------------------------------------------
//返回
// SD卡的容量,单位为M
// sector count and multiplier MB are in
u08 == C_SIZE / (2 ^ (9 - C_SIZE_MULT))
// SD卡的名称
//----------------------------------------------------------------------
void SD_get_volume_info()
{
unsigned char i;
unsigned char c_temp[5];
VOLUME_INFO_TYPE SD_volume_Info, *vinf;
vinf = &
SD_volume_Info; //Init the pointoer;
/ 读取CSD寄存器
Read_CSD_SD(sectorBuffer.dat);
//获取总扇区数
vinf->sector_count = sectorBuffer.dat[6] & amp;
0x03;
vinf->sector_count <<= 8;
vinf->sector_count += sectorBuffer.dat[7];
vinf->sector_count <<= 2;
vinf->sector_count += (sectorBuffer.dat[8] & amp; 0xc0) >> 6;
// 获取multiplier
vinf->sector_multiply = sectorBuffer.dat[9] & amp;
0x03;
vinf->sector_multiply <<= 1;
vinf->sector_multiply += (sectorBuffer.dat[10] & amp; 0x80) >> 7;
//获取SD卡的容量
vinf->size_MB = vinf->sector_count >> (9 - vinf->sector_multiply);
// get the name of the card
Read_CID_SD(sectorBuffer.dat);
vinf->name[0] = sectorBuffer.dat[3];
vinf->name[1] = sectorBuffer.dat[4];
vinf->name[2] = sectorBuffer.dat[5];
vinf->name[3] = sectorBuffer.dat[6];
vinf->name[4] = sectorBuffer.dat[7];
vinf->name[5] = 0x00; //end flag
}
以上程序将信息装载到一个结构体中,这个结构体的定义如下:
typedef struct SD_VOLUME_INFO {
//SD/SD Card info
unsigned int size_MB;
unsigned char sector_multiply;
unsigned int sector_count;
unsigned char name[6];
} VOLUME_INFO_TYPE;
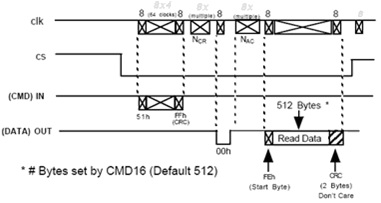
5) 扇区读
扇区读是对SD卡驱动的目的之一。SD卡的每一个扇区中有512个字节,一次扇区读操作将把某一个扇区内的512个字节全部读出。过程很简单,先写入命令,在得到相应的回应后,开始数据读取。
扇区读的时序:
扇区读的程序例程:
unsigned char SD_Read_Sector(unsigned long sector, unsigned char *buffer)
{
unsigned char retry;
//命令16
unsigned char CMD[] = {0x51, 0x00, 0x00, 0x00, 0x00, 0xFF};
unsigned char temp;
//地址变换 由逻辑块地址转为字节地址
sector = sector << 9; //sector = sector * 512
CMD[1] = ((sector & amp; 0xFF000000) >> 24 );
CMD[2] = ((sector & amp; 0x00FF0000) >> 16 );
CMD[3] = ((sector & amp; 0x0000FF00) >> 8 );
//将命令16写入SD卡
retry = 0;
do {
//为了保证写入命令 一共写100次
temp = Write_Command_MMC(CMD);
retry++;
if (retry == 100) {
return (READ_BLOCK_ERROR); //block write Error!
}
}
while (temp != 0);
//Read Start Byte form MMC/SD-Card (FEh/Start Byte)
//Now data is ready,you can read it out.
while (Read_Byte_MMC() != 0xfe);
readPos = 0;
SD_get_data(512, buffer) ; //512字节被读出到buffer中
return 0;
}
其中SD_get_data函数如下:
//---------------------------------------------------------
获取数据到buffer中
//---------------------------------------------------------
void SD_get_data(unsigned int Bytes, unsigned char *buffer)
{
unsigned int j;
for (j = 0; j < Bytes; j++)
*buffer++ = Read_Byte_SD();
}
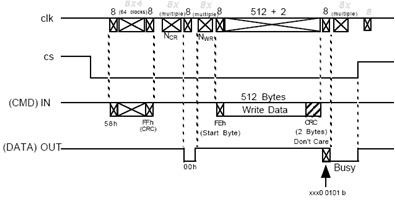
6) 扇区写
扇区写是SD卡驱动的另一目的。每次扇区写操作将向SD卡的某个扇区中写入512个字节。过程与扇区读相似,只是数据的方向相反与写入命令不同而已。
扇区写的时序:
扇区写的程序例程:
//-----------------------------------------------------------------
写512个字节到SD卡的某一个扇区中去 返回0说明写入成功
//-----------------------------------------------------------------
unsigned char SD_write_sector(unsigned long addr, unsigned char *Buffer)
{
unsigned char tmp, retry;
unsigned int i;
//命令24
unsigned char CMD[] = {0x58, 0x00, 0x00, 0x00, 0x00, 0xFF};
addr = addr << 9; //addr = addr * 512
CMD[1] = ((addr & amp; 0xFF000000) >> 24 );
CMD[2] = ((addr & amp; 0x00FF0000) >> 16 );
CMD[3] = ((addr & amp; 0x0000FF00) >> 8 );
//写命令24到SD卡中去
retry = 0;
do {
//为了可靠写入,写100次
tmp = Write_Command_SD(CMD);
retry++;
if (retry == 100) {
return (tmp); //send commamd Error!
}
}
while (tmp != 0);
//在写之前先产生100个时钟信号
for (i = 0; i < 100; i++) {
Read_Byte_SD();
}
//写入开始字节
Write_Byte_MMC(0xFE);
//现在可以写入512个字节
for (i = 0; i < 512; i++) {
Write_Byte_MMC(*Buffer++);
}
//CRC-Byte
Write_Byte_MMC(0xFF); //Dummy CRC
Write_Byte_MMC(0xFF); //CRC Code
tmp = Read_Byte_MMC(); // read response
if ((tmp & amp; 0x1F) != 0x05) { // 写入的512个字节是未被接受
SPI_CS = 1;
return (WRITE_BLOCK_ERROR); //Error!
}
//等到SD卡不忙为止
//因为数据被接受后,SD卡在向储存阵列中编程数据
while (Read_Byte_MMC() != 0xff) {};
//禁止SD卡
SPI_CS = 1;
return (0); //写入成功
}
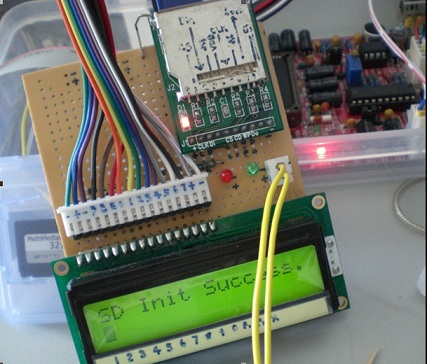
此上内容在笔者的实验中都已调试通过。单片机采用STC89LE单片机(SD卡的初始化电压为2.0V~3.6V,操作电压为3.1V~3.5V,因此不能用5V单片机,或进行分压处理),工作于22.1184M的时钟下,由于所采用的单片机中没硬件SPI,采用软件模拟SPI,因此读写速率都较慢。如果要半SD卡应用于音频、视频等要求高速场合,则需要选用有硬件SPI的控制器,或使用SD模式,当然这就需要各位读者对SD模式加以研究,有了SPI模式的基础,SD模式应该不是什么难事。
-
 热敏电阻温度阻值查询程序2024年11月13日 74
热敏电阻温度阻值查询程序2024年11月13日 74 -
C99语法规则2024年11月16日 675
-
 FreeRTOS 动态内存管理2024年11月12日 448
FreeRTOS 动态内存管理2024年11月12日 448 -
一款常用buffer程序2024年11月06日 88
-
 1602液晶显示模块的应用2012年08月03日 191
1602液晶显示模块的应用2012年08月03日 191 -
GNU C 9条扩展语法2024年11月18日 261
-
 如何实现STM32F407单片机的ADC转换2024年11月15日 300
如何实现STM32F407单片机的ADC转换2024年11月15日 300 -
 STM32使用中断屏蔽寄存器BASEPRI保护临界段2024年11月15日 195
STM32使用中断屏蔽寄存器BASEPRI保护临界段2024年11月15日 195
-
C99语法规则2024年11月16日 675
-
 51单片机LED16*16点阵滚动显示2012年09月05日 664
51单片机LED16*16点阵滚动显示2012年09月05日 664 -
FreeRTOS 动态内存管理2024年11月12日 448
-
 ARM9远程图像无线监控系统2012年07月03日 424
ARM9远程图像无线监控系统2012年07月03日 424 -
 用单片机模拟2272软件解码2012年09月06日 300
用单片机模拟2272软件解码2012年09月06日 300 -
如何实现STM32F407单片机的ADC转换2024年11月15日 300
-
 新颖的单片机LED钟2012年08月06日 278
新颖的单片机LED钟2012年08月06日 278 -
GNU C 9条扩展语法2024年11月18日 261