1、限幅滤波
/*A值可根据实际情况调整
value为有效值,new_value为当前采样值
滤波程序返回有效的实际值*/
#define A 10
char value;
char filter()
{
charnew_value;
new_value = get_ad();
if ( ( new_value - value > A ) || ( value - new_value > A )
return value;
return new_value;
}2、中位值滤波法
/*N值可根据实际情况调整
排序采用冒泡法*/
#define N11
char filter()
{
char value_buf[N];
char count,i,j,temp;
for ( count=0;count { value_buf[count] = get_ad(); delay(); } for (j=0;j { for (i=0;i { if ( value_buf>value_buf[i+1] ) { temp = value_buf; value_buf = value_buf[i+1]; value_buf[i+1] = temp; } } } return value_buf[(N-1)/2]; }3、算术平均滤波法 /* */ #define N 12 char filter() { intsum = 0; for ( count=0;count { sum + = get_ad(); delay(); } return (char)(sum/N); }4、递推平均滤波法(又称滑动平均滤波法) /* */ #define N 12 char value_buf[N]; char i=0; char filter() { char count; intsum=0; value_buf[i++] = get_ad(); if ( i == N )i = 0; for ( count=0;count sum = value_buf[count]; return (char)(sum/N); }5、中位值平均滤波法(又称防脉冲干扰平均滤波法) /* */ #define N 12 char filter() { char count,i,j; char value_buf[N]; intsum=0; for(count=0;count { value_buf[count] = get_ad(); delay(); } for (j=0;j { for (i=0;i { if ( value_buf>value_buf[i+1] ) { temp = value_buf; value_buf = value_buf[i+1]; value_buf[i+1] = temp; } } } for(count=1;count sum += value[count]; return (char)(sum/(N-2)); }6、限幅平均滤波法 /* */ 略 参考子程序1、37、一阶滞后滤波法 /* 为加快程序处理速度假定基数为100,a=0~100 */ #define a 50 char value; char filter() { charnew_value; new_value = get_ad(); return (100-a)*value + a*new_value; }8、加权递推平均滤波法 /* coe数组为加权系数表,存在程序存储区。*/ #define N 12 char code coe[N] = {1,2,3,4,5,6,7,8,9,10,11,12}; char code sum_coe = 1+2+3+4+5+6+7+8+9+10+11+12; char filter() { char count; char value_buf[N]; intsum=0; for (count=0,count { value_buf[count] = get_ad(); delay(); } for (count=0,count sum += value_buf[count]*coe[count]; return (char)(sum/sum_coe); } 9、消抖滤波法 #define N 12 char filter() { char count=0; char new_value; new_value = get_ad(); while (value !=new_value); { count++; if (count>=N)return new_value; delay(); new_value = get_ad(); } return value; }
-
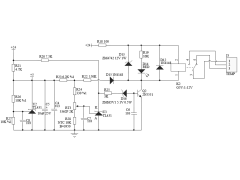 一款高温报警电路2024年11月13日 81
一款高温报警电路2024年11月13日 81 -
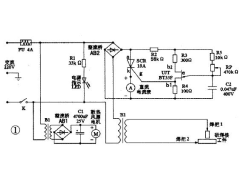
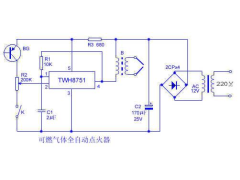 可燃气体全自动点火器2012年09月22日 76
可燃气体全自动点火器2012年09月22日 76 -
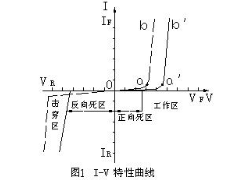 LED参数与特性2012年09月18日 118
LED参数与特性2012年09月18日 118 -
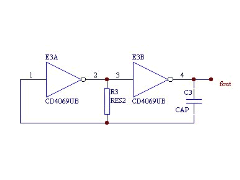 RC振荡电路的几种接法2012年09月10日 221
RC振荡电路的几种接法2012年09月10日 221 -
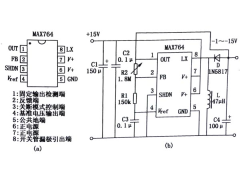 MAX764极性反转电路2012年08月24日 47
MAX764极性反转电路2012年08月24日 47 -
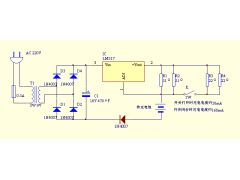 实用恒流充电器2012年08月18日 175
实用恒流充电器2012年08月18日 175 -
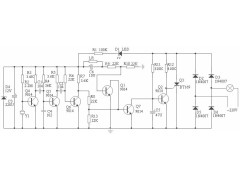
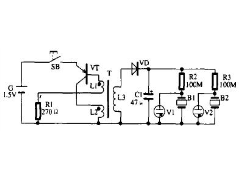 电子催眠器制作2012年08月15日 72
电子催眠器制作2012年08月15日 72 -
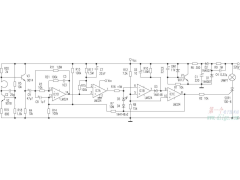 多普勒自动电子开关2012年08月02日 78
多普勒自动电子开关2012年08月02日 78
-
 常用物质金属非金属的电阻率、导电率明细表2024年11月23日 4874
常用物质金属非金属的电阻率、导电率明细表2024年11月23日 4874 -
 自制微型交流电焊机2012年07月14日 1143
自制微型交流电焊机2012年07月14日 1143 -
 声光控延时开关的制作2024年07月06日 915
声光控延时开关的制作2024年07月06日 915 -
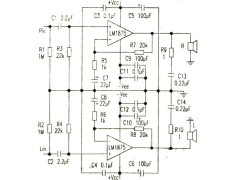 用LM1875替找TDA20302012年09月15日 777
用LM1875替找TDA20302012年09月15日 777 -
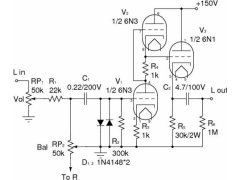 6N3+LM4780功放制作2012年09月13日 653
6N3+LM4780功放制作2012年09月13日 653 -
 小型太阳能供电板的制作2012年09月08日 649
小型太阳能供电板的制作2012年09月08日 649 -
 简单的逆变器电路2012年07月08日 560
简单的逆变器电路2012年07月08日 560 -
 1000米晶体稳频FM立体声发射机2012年07月22日 499
1000米晶体稳频FM立体声发射机2012年07月22日 499