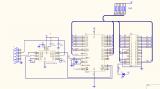
51单片机硬盘控制电路以及源程序
2012-12-02
#include <reg51.h>
/**************************************************
*HardDisk Control Demo
*Power BY DDDLZHU
*编译环境 : KEIL C51 V7.07支持器件 : AT89C51
*COPYRIGHT (C) 2004
***************************************************/
#define byte unsigned char
#define uint unsigned int
/*************************************************
//线路连接定义。如电路有变直接修改就可以了
*************************************************/
#define DataH P1
#define DataL P0
#define RegAddr P2
#define Read P3_4
#define Write P3_3
#define Rst P3_2
/*************************************************
//线路连接定义。如电路有变直接修改就可以了
*************************************************/
//寄存器地址定义
#define _Status_Control 0x16
#define _Data 0x8
#define _Err_Features 0x9
#define _SecCount 0xa
#define _SecNum 0xb
#define _CylinderL 0xc
#define _CylinderH 0xd
#define _DeviceAndHead 0xe
#define _Status_Command 0xf
//**************************************************************************************/
/*这里为初始化硬盘的重要参数,每个硬盘的参数都不尽相同。若不正确则读不了盘中的数据。计算方法如下:
先看清楚你的 硬盘表面标签中的数据,里面有三个重要参数:
1。柱面数(Cylinder)
2。磁头数(Head)
3。磁道数(Sector)
其中 _MaxHead=0xA+Head
_MaxSector=Sector
例如我的130M硬盘(很老吧,哈哈),磁头数为15,十六进制为0xf,所以_MaxHead=0xAF,磁道数为17,所以_MaxSector=0x11
*/
#define _MaxHead 0xAF
#define _MaxSector 0x11
//************************************************************************************
byte bdata Status = 0x00;
sbit ERR = Status ^ 0;
sbit IDX = Status ^ 1;
sbit CORR = Status ^ 2;
sbit DRQ = Status ^ 3;
sbit DSC = Status ^ 4;
sbit DF = Status ^ 5;
sbit DRDY = Status ^ 6;
sbit BSY = Status ^ 7;
//************************************************************
* D7D6D5D4D3D2D1D0*
BSYDRDYDWFDSC DRQCORRIDXERR*
BSY:驱动器忙;*
DRDY:驱动器准备好;*
DWF:驱动器写失败;*
DSC:
寻道结束;*
DRQ:请求服务,驱动器希望通过数据寄存器与CPU交换一字节数据;*
CORR:当可以纠正的读错误发生时,该位置1,数据传输将继续进行 *
IDX:收到综引信号;*
ERR:命令执行出错。*
************************************************************* /
byte Data_bufferH = 0x0;
byte Data_bufferL = 0x0;
//***************串口子程序
void send_string(unsigned char *word);
void send_char(unsigned char word);
unsigned char get_char(void);
/*******************************************************
:延迟函数
********************************************************/
void delay(byte ms)
{
byte i, j;
for (i = 0; i
for (j = 0; j < 255; j++);
}
/*******************************************************
*读寄存器
********************************************************/
byte ReadReg(byte Addr)
{
RegAddr = Addr;
DataL = 0xff;
Read = 0;
Status = DataL;
Read = 1;
return Status;
}
/*******************************************************
*等待BSY信号
********************************************************/
byte WaitBSY(void)
{
byte timeOut = 0;
do {
ReadReg(_Status_Command);
timeOut++;
//if(timeOut>=254) return(0xff);
}
while (BSY);
return (1);
}
/*****************************************************
*写寄存器值
********************************************************/
void WriteReg(byte Addr, byte Data)
{
RegAddr = Addr;
Write = 0;
DataL = Data;
Write = 1;
}
/*******************************************************
读数据储存器中数据
********************************************************/
void ReadData(void)
{
DataH = 0xff;
DataL = 0xff;
RegAddr = _Data;
Read = 0;
Data_bufferL = DataL;
Data_bufferH = DataH;
Read = 1;
}
/*******************************************************
写数据寄存器中数据
********************************************************/
void WriteData(void)
{
RegAddr = _Data;
Write = 0;
DataL = Data_bufferL;
DataH = Data_bufferH;
Write = 1;
}
/**********************************************************
初始化硬盘*
***********************************************************/
void Init(void)
{
do {
WriteReg(_DeviceAndHead, 0xa0);
ReadReg(_Status_Command);
}
while (!DRDY | BSY);
WriteReg(_DeviceAndHead, _MaxHead);
WriteReg(_SecCount, _MaxSector);
WriteReg(_Status_Command, 0x91);
WaitBSY();
WriteReg(_Status_Command, 0x10);
WaitBSY();
}
/**********************************************************
读硬盘参数
***********************************************************/
void DriverID(void)
{
unsigned int i = 512;
//send_string("Starting read driver ID\n");
WaitBSY();
//send_string("Now can read driver ID\n");
WriteReg(_Status_Command, 0xec);
//send_string("Waiting..");
do {
ReadReg(_Status_Command);
}
while (BSY | !DRQ);
//send_string("Now Sending\n");
while (i) {
ReadData();
send_char(Data_bufferH);
send_char(Data_bufferL);
i -= 2;
}
}
/*********************************************************
硬盘寻址
**********************************************************/
WriteCHS(byte head, uint cylinder, byte sector, byte read_count)
{
WaitBSY();
WriteReg(_DeviceAndHead, 0xa0 | head);
WriteReg(_CylinderH, (char)(cylinder >> 8));
WriteReg(_CylinderL, (char)(cylinder & 0x00ff));
WriteReg(_SecNum, sector);
WriteReg(_SecCount, read_count);
}
/**********************************************************
*用途:将硬盘的返回数据读入BUFFER数组
***********************************************************/
void SendData()
{
uint i;
i = 512 * 15;
do {
ReadReg(_Status_Command);
}
while (BSY | !DRQ);
if (ERR) {
send_string("\x0d\x0a Error\x0d\x0a");
}
while (i) {
ReadData();
send_char(Data_bufferL);
send_char(Data_bufferH);
i -= 2;
}
}
// 激活硬盘(转动)
void SpinUP()
{
WaitBSY();
WriteReg(_Status_Command, 0xE1);
}
// 让硬盘休眠(停转)/
void SpinDown()
{
WaitBSY();
WriteReg(_Status_Command, 0xE0);
}
void main(void)
{
//Initialize
SCON = 0x50; //串口初始化
TMOD = 0x20; //波特率为57600bps
TCON = 0x40;
PCON = 0x80;
TH1 = 0xFf;
TL1 = 0xFf;
TR1 = 1;
send_string("IDE Control Demo.Power By DDDLZHU\x0d\x0a");//send welcome word
Rst = 0; //IDE 复位
delay(50);
Rst = 1;
delay(255);
send_string("Reset Driver OK...\x0d\x0a");
Init();//初始化硬盘
send_string("Initialize Driver OK,Now Read ID\x0d\x0a");
send_string("HardDisk ID is ....\x0d\x0a");
DriverID();//读硬盘id
send_string("\n\nNow Read The First Sector On this HardDisk\x0d\x0a\x0d\x0a");
delay(244);
delay(244);
delay(244);
delay(244);
WriteCHS(0, 0, 1, 16); //写地址
WaitBSY();
WriteReg(_Status_Command, 0x20); //发送读命令
SendData();
send_string("\x0d\x0a\x0d\x0a Read OK,Now Shut Down The HardDisk..\x0d\x0a");
SpinDown();//硬盘停转
while (1);
}
//**************************************串口子程序
void send_char(unsigned char word)
{
TI = 0;
SBUF = word;
while (TI == 0);
TI = 0;
}
void send_string(unsigned char *word)
{
TI = 0;
while (*word != 0) {
SBUF = *word;
while (TI == 0);
TI = 0;
word++;
}
}
unsigned char get_char(void)
{
RI = 0;
REN = 1;
while (RI == 0);
return (SBUF);
RI = 0;
REN = 0;
}
可能会用到的工具/仪表
相关文章
推荐文章
-
 热敏电阻温度阻值查询程序2024年11月13日 74
热敏电阻温度阻值查询程序2024年11月13日 74 -
C99语法规则2024年11月16日 675
-
 FreeRTOS 动态内存管理2024年11月12日 448
FreeRTOS 动态内存管理2024年11月12日 448 -
一款常用buffer程序2024年11月06日 88
-
 1602液晶显示模块的应用2012年08月03日 192
1602液晶显示模块的应用2012年08月03日 192 -
GNU C 9条扩展语法2024年11月18日 261
-
 如何实现STM32F407单片机的ADC转换2024年11月15日 300
如何实现STM32F407单片机的ADC转换2024年11月15日 300 -
 STM32使用中断屏蔽寄存器BASEPRI保护临界段2024年11月15日 195
STM32使用中断屏蔽寄存器BASEPRI保护临界段2024年11月15日 195
热门文章
-
C99语法规则2024年11月16日 675
-
 51单片机LED16*16点阵滚动显示2012年09月05日 664
51单片机LED16*16点阵滚动显示2012年09月05日 664 -
FreeRTOS 动态内存管理2024年11月12日 448
-
 ARM9远程图像无线监控系统2012年07月03日 424
ARM9远程图像无线监控系统2012年07月03日 424 -
 用单片机模拟2272软件解码2012年09月06日 300
用单片机模拟2272软件解码2012年09月06日 300 -
如何实现STM32F407单片机的ADC转换2024年11月15日 300
-
 新颖的单片机LED钟2012年08月06日 278
新颖的单片机LED钟2012年08月06日 278 -
GNU C 9条扩展语法2024年11月18日 261
章节目录