编程文件格式的转换
MAX+plusII或QuartusII生成的SOF或POF文件不能直接用于CPU配置FPGA中,需要进行数据转换才能得到软件可用的配置数据。在MaxplusII中的具体步骤如下:
1. 进入数据转换对话框
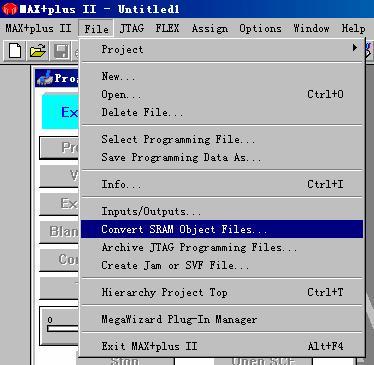
图1 进入数据转换对话框
2.选择需要转换的SOF文件,对于配置多个FPGA的场合,应选择所有的SOF文件并排好次序。输出文件的格式我们选则二进制的rbf(Sequential)。 (也可以选择其他格式,如HEX等,在CPU软件编写上会与本文例子略有区别,关于不同文件格式的区别,在altera的AN116号文档上有详细解释)
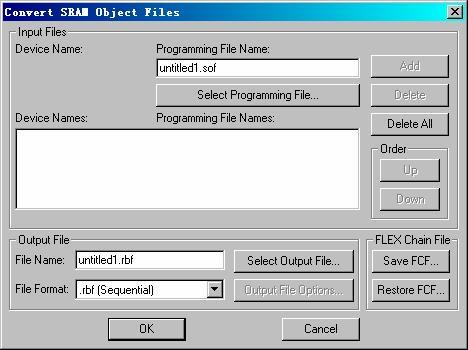
图2 选择相应的输出数据格式
在QuartusII软件的file菜单下,同样可以找到类似菜单进行格式转化。
CPU程序设计
以MPC860为例,我们可以将转换完成的RBF文件作为二进制文件,直接写到MPC860系统的某一ROM/Flash区域。由于这段数据的起始地址和长度都是已知的,相应的软件编写是很方便的。
本设计的CPU源程序
void InitPORT(void)
{ // 初始化PB口相应位:
// PB24-输出,PB25-输入,PB26-输出,PB27-输入,PB28-输出
IMMR->pip_pbpar=0x00000000;
IMMR->pip_pbdir=0xFFFFF5AF;
IMMR->pip_pbodr=0x00000000;
IMMR->pip_pbdat=0xffffff57;
}
UBYTE Fpga_DownLoad(void)
{ // FPGA配置
UBYTE *Bootaddr;
UWORD CountNum=0x0;
UBYTE FpgaBuffer, i;
// 获得Boot区首地址
Bootaddr=(UBYTE *)(IMMR->memc_or0 & IMMR->memc_br0 & 0xFFFF8000);
Set_nCONFIG(0); // nCONFIG="0",使FPGA进入配置状态
Set_DCLK(0);
DELAY5us();
if (Read_nSTATUS() == 1)
{ // 检测nSTATUS,如果为"0",表明FPGA已响应配置要求,可开始进行配置。否则报错
Err_LED(1);
return 0;
}
Set_nCONFIG(1);
DELAY5us();
// 开始输出配置数据:
while(CountNum <= 0x0e74e)
{
FpgaBuffer= *(Bootaddr+0x70000+CountNum);
for (i=0; i<8; i++)
{ // DCLK="0"时,在Data0上放置数据(LSB first)
Set_Data0(FpgaBuffer&0x01);
Set_DCLK(1); // DCLK->"1",使FPGA读入数据
FpgaBuffer >>= 1; // 准备下一位数据
if (Read_nSTATUS() == 0)
{ // 检测nSTATUS,如果为"0",表明FPGA配置出错
Err_LED(1);
return 0;
}
Set_DCLK(0);
}
CountNum++;
}
// FPGA初始化:
// ACEX 1K和FLEX 10KE需要10个周期,APEX 20K需要40个周期
for(i=0; i<10; i++)
{
Set_DCLK(1);
DELAY100us();
Set_DCLK(0);
DELAY100us();
}
Set_Data0(0);
if (Read_nCONF_Done() == 0)
{ // 检测nCONF_Done,如果为"0",表明FPGA配置未成功
Err_LED(1);
return 0;
}
return 1; // 成功返回
}
// Data0输出
void Set_Data0(UBYTE setting)
{ // PB24
if (setting) IMMR->pip_pbdat |= 0x00000080;
else IMMR->pio_pbdat &= 0xFFFFFF7F;
}
// 读nSTATUS状态
UBYTE Read_nSTATUS(void)
{ // PB25
if (IMMR->pio_pbdat & 0x00000040) return 1;
else return 0;
}
// 设置nCONFIG电平
void Set_nCONFIG(UBYTE setting)
{ // PB26
if (setting) IMMR->pip_pbdat |= 0x00000020;
else IMMR->pio_pbdat &= 0xFFFFFFDF;
}
// 读nCONF_Done状态
UBYTE Read_nCONF_Done(void)
{ // PB27
if (IMMR->pio_pbdat & 0x00000010) return 1;
else return 0;
}
// 输出DCLK
void Set_DCLK(UBYTE setting)
{ // PB28
if (setting) IMMR->pio_pbdat |= 0x00000008;
else IMMR->pio_pbdat &= 0xFFFFFFF7;
}
// 结束
-
 热敏电阻温度阻值查询程序2024年11月13日 74
热敏电阻温度阻值查询程序2024年11月13日 74 -
C99语法规则2024年11月16日 675
-
 FreeRTOS 动态内存管理2024年11月12日 448
FreeRTOS 动态内存管理2024年11月12日 448 -
一款常用buffer程序2024年11月06日 88
-
 1602液晶显示模块的应用2012年08月03日 192
1602液晶显示模块的应用2012年08月03日 192 -
GNU C 9条扩展语法2024年11月18日 261
-
 如何实现STM32F407单片机的ADC转换2024年11月15日 300
如何实现STM32F407单片机的ADC转换2024年11月15日 300 -
 STM32使用中断屏蔽寄存器BASEPRI保护临界段2024年11月15日 195
STM32使用中断屏蔽寄存器BASEPRI保护临界段2024年11月15日 195
-
C99语法规则2024年11月16日 675
-
 51单片机LED16*16点阵滚动显示2012年09月05日 664
51单片机LED16*16点阵滚动显示2012年09月05日 664 -
FreeRTOS 动态内存管理2024年11月12日 448
-
 ARM9远程图像无线监控系统2012年07月03日 424
ARM9远程图像无线监控系统2012年07月03日 424 -
 用单片机模拟2272软件解码2012年09月06日 300
用单片机模拟2272软件解码2012年09月06日 300 -
如何实现STM32F407单片机的ADC转换2024年11月15日 300
-
 新颖的单片机LED钟2012年08月06日 278
新颖的单片机LED钟2012年08月06日 278 -
GNU C 9条扩展语法2024年11月18日 261