摘要:以Samsung公司的ARM9系列的S3C2410和TI公司的TMS320C6416为例,详细介绍S3C2410芯片外部I/O与C6416芯片HPI口硬件连接技术和基于ARM uClinux的HPI驱动程序开发。设计结果实现了接口数据稳定快速读写,此设计方案对其他双核接口设计开发有很好的指导作用。
Web技术和多媒体技术的发展成为新一代嵌入式实时监控系统的重要特性。多媒体的JPEG,MPEG2/4等标准视频数据格式及各种库函数都使用32位格式和32位的编程软件,这对32位的嵌入式微处理器的实时性提出更高的要求。ARM+DSP双核嵌入式系统,以32位ARM为核心CPU,DSP作为协处理器负责视频采集压缩,从而减轻ARM核心CPU的负担,使之更好地发挥网络传输和协调控制的功能,进一步提高系统的实时性和稳定性。
本研究结合实验室的基于虚拟动态模拟的远程机器人状态检测与智能控制技术的设计方案,主要研究ARM S3C2410处理器与DSP C6416芯片的连接软硬件设计,并介绍ARM与DSP连接的HPI接口驱动程序的编程实现方法。
1 系统硬件结构设计
系统整体结构框图如图1所示。
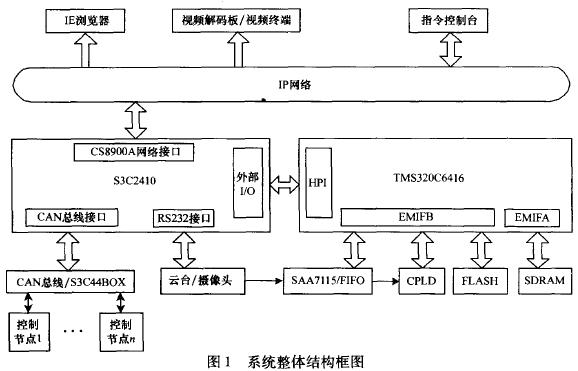
系统实现在本地通过浏览器,视频终端显示远程机器人状态视频信息,并通过本地指令控制台对机器人进行控制。S3C2410实现远程上位机功能,协调与DSP之间数据交换,并将数据通过网络发送到本地。此外S3C2410通过CAN总线上ARM7 S3C44B0控制机器人智能节点。
2 S3C2410与TMS320C6416硬件连接设计
2.1 ARM外部I/O与HPI硬件连接
S3C2410与TMS320C6416硬件接口如图2所示,
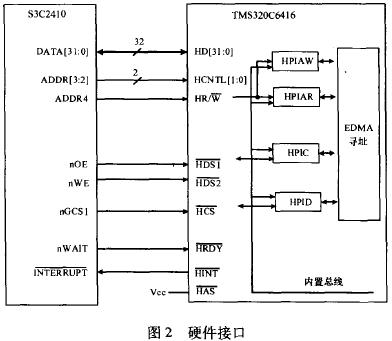
S3C2410的两根地址线ADDR[3:2]接HPI口的HCNTL[1:0],以实现ARM对HPI口3个寄存器的访问。S3C2410用ADDR4代替读写选通信号连接HPI口的HR/W。S3C2410片选信号nGCS1接到HPI片选HCS上,将DSP的HPI接口作为外部物理地址映射到S3C2410相应的内核空间,位于外部I/O接口BANK1地址0x08000000~0x0FFFFFFF上。
2.2 接口工作原理
S3C2410外部I/O对HPI接口3个寄存器(HPIA,HPIC和HPID)分别实现了ARM与DSP软件握手与中断请求,锁存ARM访问DSP存储单元地址,以及数据交换。S3C2410访问顺序,首先是初始化HPIC寄存器和HPIA寄存器。接下来是HPID寄存器数据读写。对于HPID读操作,S3C2410完成对HPIA访问后,DSP的EDMA自动将数据从HPIA寄存器所指定的地址预取到HPID。HPID有两个地址,s3C2410对一个地址访问,HPIA保持不变,访问其外一个地址时,HPIA地址自动加一。对于写操作原理类似,S3C2410完成对HPID的写操作后,EDMA将数据写到HPIA指定的存储地址单元里。s3c2410同样对HPID两个地址进行访问,HPIA地址随新数据的写入而更新,从而实现s3C2410对HPID的连续写入。
3 HPI接口设备驱动程序软件设计
3.1 Linux设备驱动程序
Linux设备类型分为3种:字符设备,块设备和网络设备。本设计将HPI外设归类于字符设备。在系统内部,字符设备驱动程序都提供类似文件操作的open,close,read,write,ioctl等函数人口,详见
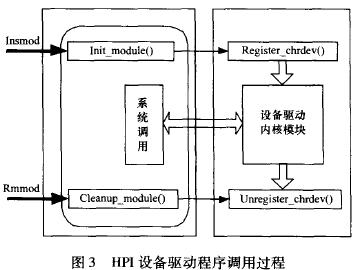
3.2 HPI设备驱动程序设计
3.2.1 HPI接口设备数据结构及其文件系统接口定义
HPI接口设备数据结构是自定义的,它完成各个不同系统调用之间的协调工作,因此在设备驱动中是全局数据结构变量。具体定义如下:
Struct HPI_DEVICE{
devfs_handle_t devfs; //devfs device
char isopen; //device status:1=opened,0=closed
int MajorID;
kdev_t MinorID;
U16 DriverType;
char *HpiBaseBufRead:
char *HpiBaseBufWrite;
wait_queue_head_t rd_wait; //read timeouts
struct semaphore sem; //lock to prevent concurrent reads or writes
#if defined(DMA_SUPPORT) //DMA
DMA_CHANNEL_INFO DmaInfo[NUMBER_OF_DMA_CHANNELS];
Spinlock_t LockDmaChannel;
#endif
struct file_operations hpi_fops;
}
文件系统接口定义是用户使用HPI设备的接口,合理定义设备驱动程序在内核中的源码就能简化应用程序的设计。
Static struct file_operations hpi_fops={
owner:THIS_MODULE,
open:hpi_open,
read:hpi_read,
write:hpi_write,
ioctl:hpi_ioctl,
mmap:hpi_mmap,
release:hpi_release,
};
3.2.2 读取HPI接口数据
HPI设备驱动程序的开发大多数工作都集中在struct file_operations中接口函数的编写上,这些函数是应用程序通过内核操作硬件设备的人口函数,下面将给出对HPI接口读数据的关键代码。
#define HPI_BASEADDR 0x08000000 //BANK 1
#define bHPI(Nb) _REG1(HPI_BASEADDR+(Nb))
#define HPIC_WRITE bHPI(0x0)
#define HPIC_READ bHPI(0x40)
#define HPIA_WRITE bHPI(0x10)
#define HPIA_READ bHPI(0x50)
#deftne HPID_WRITE bHPI(0x20)
#define HPID_READ bHPI(0x60)
Static ssize_t hpi_read(struct file *file,char *buf,size_t count,loff_t *oppos)
{
Struct HPI_DEVICE *pHpiDevice;
int i,hpi_size;
size_t ret;
down(&(pHpiDevice->sem));
hpi_size=1024;
for(i=0;i { HPIC_WRITE =0x00000000: //初始化HPI控制寄存器 HPIA_WRITE =0x80000000; //初始化HPI地址寄存器,读取DSP地址为0x80000000的数据 (__U8 *)(&pHpiDevice->HpiBaseBufRead[i])= HPID_READ;//读取1K到HpiBaseBufRead缓冲区 } IBUF_SIZE =hpi_size: ret=copy_to_user(buf,(__U8 *)(&pHpiDevice->HpiBaseBufRead),IBUF_SIZE) ? -EFAULT:ret; up(&(pHpiDevice->sem)); return IBUF_SIZE; }4 结束语
随着DSP对密集复杂数据处理能力的加强,ARM对控制和网络功能的进一步完善,基于两者的双核数据处理系统将在未来应用于更广泛的科研领域,而双核之间数据交换的快速性和稳定性也将成为双核数据处理系统开发的重点。TMS320C6416+S3C2410的软硬件设计在本实验室项目上得到初步应用,验证了理论设计的可行性,实现了接口数据稳定快速读写,对以后其他双核接口设计,尤其是驱动程序的开发有很好的指导作用与参考价值。
-
 热敏电阻温度阻值查询程序2024年11月13日 74
热敏电阻温度阻值查询程序2024年11月13日 74 -
C99语法规则2024年11月16日 675
-
 FreeRTOS 动态内存管理2024年11月12日 448
FreeRTOS 动态内存管理2024年11月12日 448 -
一款常用buffer程序2024年11月06日 88
-
 1602液晶显示模块的应用2012年08月03日 191
1602液晶显示模块的应用2012年08月03日 191 -
GNU C 9条扩展语法2024年11月18日 261
-
 如何实现STM32F407单片机的ADC转换2024年11月15日 300
如何实现STM32F407单片机的ADC转换2024年11月15日 300 -
 STM32使用中断屏蔽寄存器BASEPRI保护临界段2024年11月15日 195
STM32使用中断屏蔽寄存器BASEPRI保护临界段2024年11月15日 195
-
C99语法规则2024年11月16日 675
-
 51单片机LED16*16点阵滚动显示2012年09月05日 664
51单片机LED16*16点阵滚动显示2012年09月05日 664 -
FreeRTOS 动态内存管理2024年11月12日 448
-
 ARM9远程图像无线监控系统2012年07月03日 424
ARM9远程图像无线监控系统2012年07月03日 424 -
 用单片机模拟2272软件解码2012年09月06日 300
用单片机模拟2272软件解码2012年09月06日 300 -
如何实现STM32F407单片机的ADC转换2024年11月15日 300
-
 新颖的单片机LED钟2012年08月06日 278
新颖的单片机LED钟2012年08月06日 278 -
GNU C 9条扩展语法2024年11月18日 261